cilem tohoto projektu jsou nejen ukazat jak soucasne roboticke vysavace pracuji ale posunout toto pole více směrem komunitě. Tento text je spíš utřídědní myšlenek.
- Otevřený ale jednoduchý hw jako motivující prostředí
- Obrovská hackovatelnost
Na začátku všeho byla roomba 🙂 a pak sencor ktery se obevil v brmlabu. rozebrali jsme ho a zjsitili ze je zcela k ničemu. Metodou úvah predelal bych tohle a tamto, jsem došel k jinému zaveru: postavím si vlastní. Pro jednoho je to ale hodně práce tak jsem se pro začátek rozhodl elektroniku od samotneho podvozku oddelit. tedy pro zacatek jde o takovy uceleny set driveru pro ovladani ruzneho elektroodpadu. Velice lakava vec je zachovat iroboti protokol jako moznost a umoznit tak krok hw z vetsi casti preskocit.
- https://www.irobot.lv/uploaded_files/File/iRobot_Roomba_500_Open_Interface_Spec.pdf
tento protokol funguje na roomby s tim zebaz od verze 5 jde ovladat hlavni motor.
architektura reseni.
krasa je, ze pokud se seknu u jednoho agenta, muze to stale fungovat.
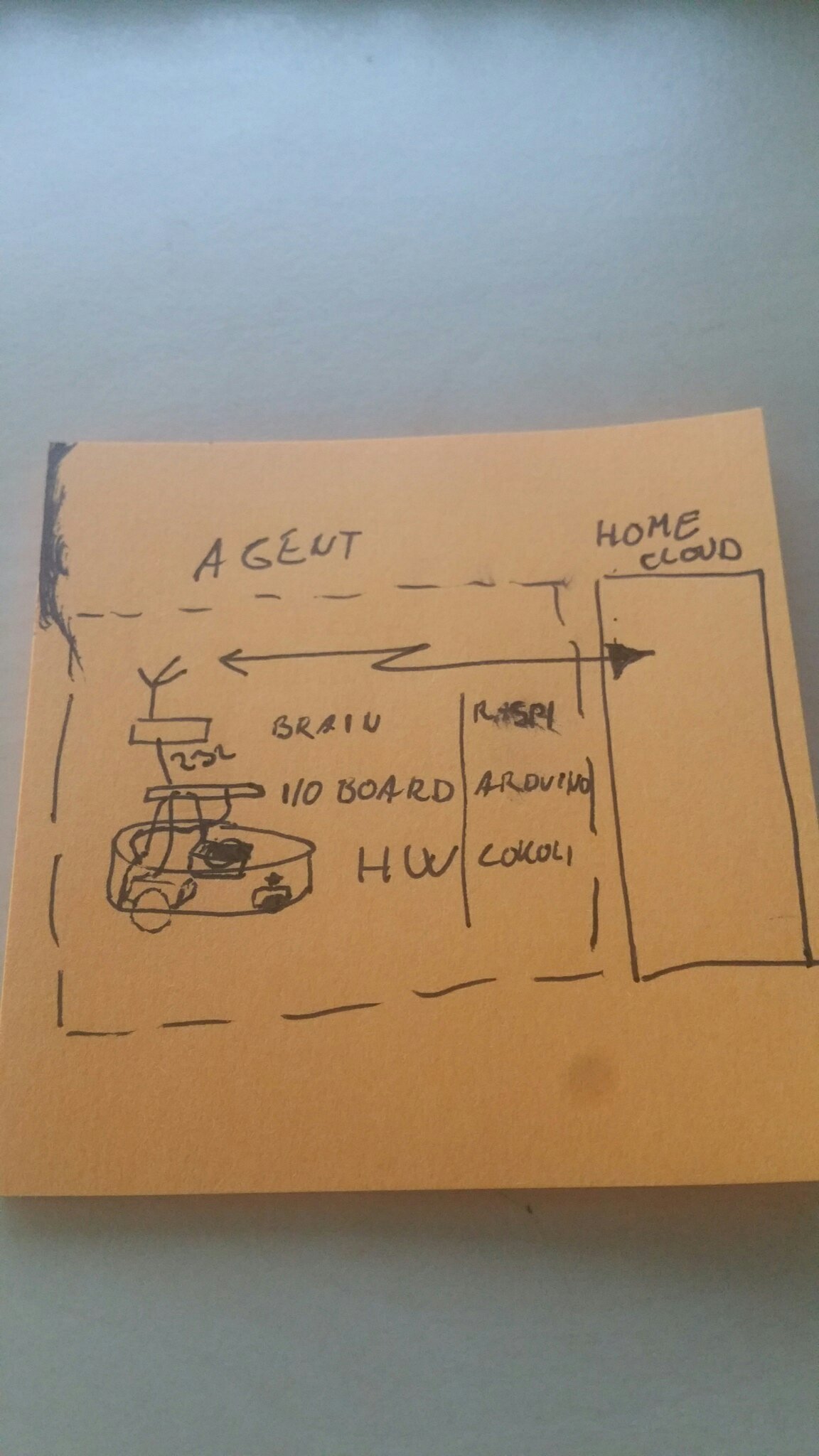
- otevřený sw založený na vecech snadno pochopitelnych. wiring (io board), node red(raspi), google tensor flow (vykonavane modely na raspi v rezimu agenta), zceho bude cloud zatim nevim.
- pridej doku od sencoru
- pro zacatek jsme do staricke roomby pridali na io boardu funkci pro zapnuti motoru…
cilem je aby ruzni roboti si dokazali uklid rozdelit, pracovat castecne online ale nasbirana data zustala „doma“ = budete skutecnymi vlastniky sveho vysavace.
zajima te to ? chtel by jsi se k projektu pridat ? Brmlab wants you 🙂